Yo Wall-E
Last year I watched a clip of humanoid robots doing kung fu, and it rearranged something in my head. Robots aren't science fiction anymore. They're products. You can order a humanoid on AliExpress for twenty thousand euros the way you'd order a desk lamp.

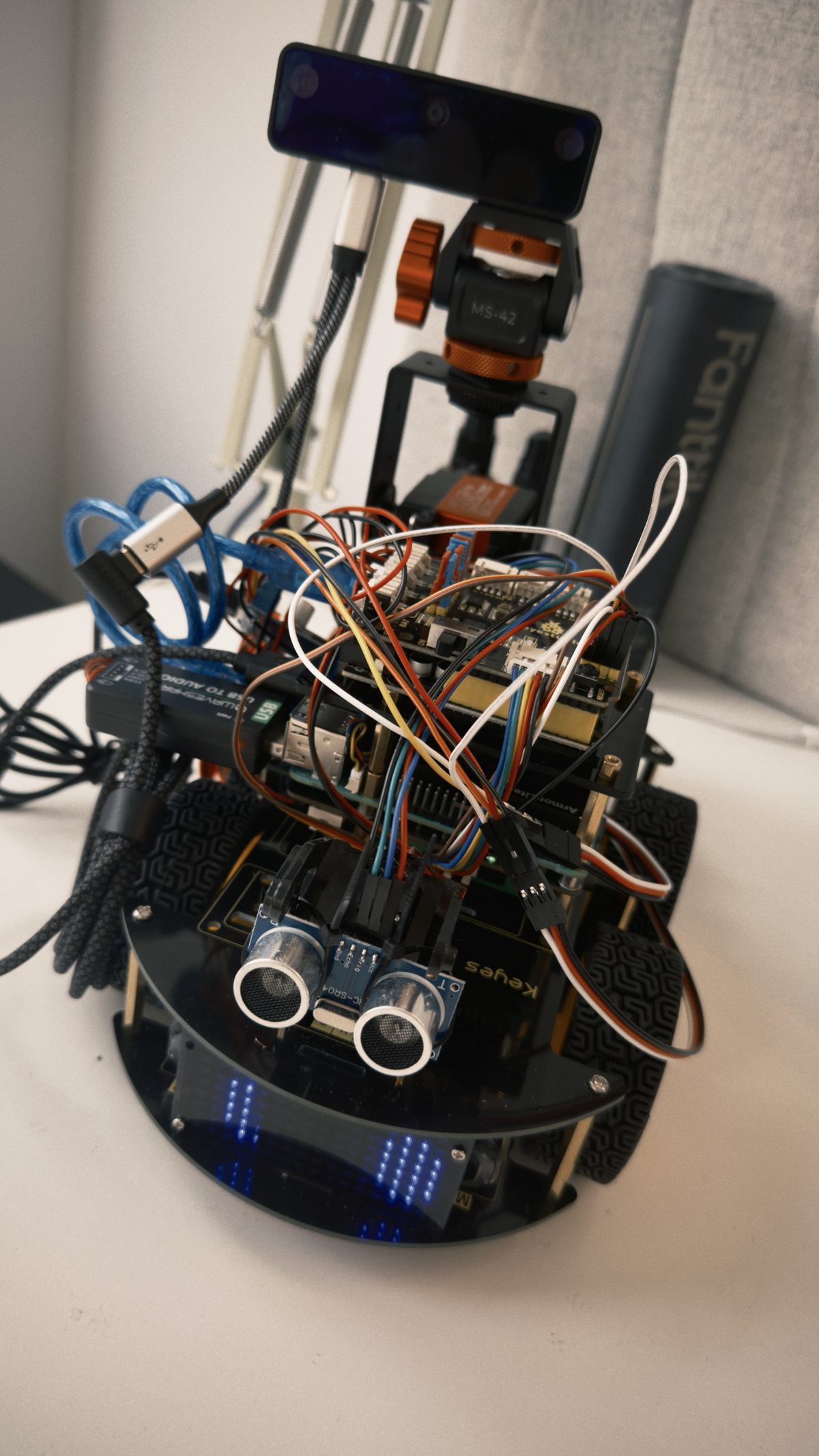
Around the same time my wife gave me a Wall-E-inspired robot kit off Amazon. Treads, a couple of servos, an Arduino. A toy. The last time I'd touched an Arduino was fifteen years ago, and all I managed then was a blinking LED. Zero robotics knowledge, zero electronics experience.
So I did what I keep telling clients to do: I sat down with the AI and started.
Drive it like a game
The first milestone was making it move with a PS5 controller: Bluetooth pairing, joystick mapping, differential drive, triggers for speed, buttons for the servos. The first time it rolled across the floor under my control was pure magic, and also clearly not enough. What if it could see? Hear? Talk? Think?
Yo Wall-E
It now runs a full voice pipeline: a locally trained wake word ("Yo Wall-E"), Whisper for transcription, Gemini or Claude as the brain, Piper or ElevenLabs for the voice, and a choreography layer that syncs speech with head movement, servo gestures and a 16x8 LED face that is tiny but surprisingly expressive. When it's happy, it does a little dance.
It sees, too. Object detection runs on the camera's own VPU at 15 frames a second, it recognizes faces and remembers who you are, and it reads eight emotions and reacts to your mood. In autonomous mode it roams, avoids obstacles, scans the room and narrates what it finds in one of four personalities, from a David Attenborough homage to a protocol droid.
Six models run on the device, no internet needed. A web dashboard with 35+ endpoints controls everything from any phone on the network, and the LLM and voice are swappable at runtime.
What the hardware taught me
Software is forgiving; hardware is not. If you wire it wrong, it literally smokes. I learned voltage and current limits, why servos jitter when motors spin up, the difference between battery chemistries, and the deep satisfaction of a clean solder joint.
That's the honest lesson, and it's the same one I bring to product work. Claude and Gemini were the patient experts beside me: firmware, async servers, ML pipelines, debugging serial protocols at midnight. Capability arrived instantly. The judgment about what to build, what "done" feels like, and when the little dance is charming rather than gimmicky stayed a human job.
Make it real, make it usable, keep human taste in the loop. Even when it has treads.